Die fortschreitende Digitalisierung und Automatisierung in der Industrie führt zu einem verstärkten Einsatz von Fahrerlosen Transportsystemen (FTS). Auch der Trend in Richtung Losgröße-1 stellt die Unternehmen vor große Herausforderungen. Sie müssen in der Lage sein, flexible und effiziente Material- und Produkttransporte innerhalb der Produktion durchzuführen. Um diese Herausforderungen zu bewältigen, bietet sich der Einsatz von FTS / AGV (Automated Guided Vehicle) an. [1]
Die Hauptaufgabe bei der Planung eines Fahrerlosen Transportsystems ist die Bestimmung der erforderlichen Anzahl an Fahrerlosen Transportfahrzeugen (FTF), um stets den geforderten Durchsatz zu erreichen, ohne das es bei Bedarfsspitzen zu sogenannten Materialflussabrissen kommt. Eine Auslegung auf Basis von Transportanzahl und Transportdistanz bei mittlerer Fahrgeschwindigkeit wird der Dynamik in der Intralogistik nicht gerecht und führt zu einer fehlerhaften Dimensionierung. Ein bewährter Lösungsansatz besteht in der Durchführung einer Transport-Simulation, welche eine tiefgehende Analyse und Optimierung erlaubt. [2] Die Simulation ermöglicht die Untersuchung der zeitlichen Transportabläufe und der Interaktionen bei der Be- und Entladung. Auch um eine optimale Integration in bereits bestehende Betriebsabläufe zu gewährleisten und die maximale Leistungsfähigkeit zu erreichen, ist der Einsatz von Simulation unerlässlich. [3]
Gemeinsam mit dem Digitalen Produktionslabor (DPL) der Hochschule Koblenz entstand das AGV-SimKit, ein Simulationstool speziell für FTS/AGV. Eine Hauptaufgabe bestand darin, ein Simulationsmodell zu konzipieren und zu entwickeln, das FTFs in einem flexibel anpassbaren Layout abbilden kann. Dabei standen eine einfache und effiziente Anwendung des Simulationstools, als auch die Möglichkeit der Weiterentwicklung, im Fokus. Das AGV-SimKit besteht u.a. aus folgenden Modulen:
- Layout-Modul: ermöglicht eine einfache Eingabe des Layouts, der Quellen und Senken unter Berücksichtigung von Fahrwegparametern (Einbahnstrasse, max. zulässige Geschwindigkeiten, etc.).
- Auftragsverwaltungs-Modul: priorisiert die übermittelten Transportaufträge und weist diese dem jeweils geeignetsten FTF zu.
- Routing-Modul: ermittelt den kürzesten Weg für den spezifischen Transportauftrag unter Vermeidung von sogenannten „Deadlocks“ der FTFs (Deadlock: zwei oder mehrere FTFs blockieren sich gegenseitig).
- Transport- Modul: dient zur Bestimmung der jeweils aktuellen FTF-Positionen und ist u.a. für das Batterie-Management der FTFs zuständig.
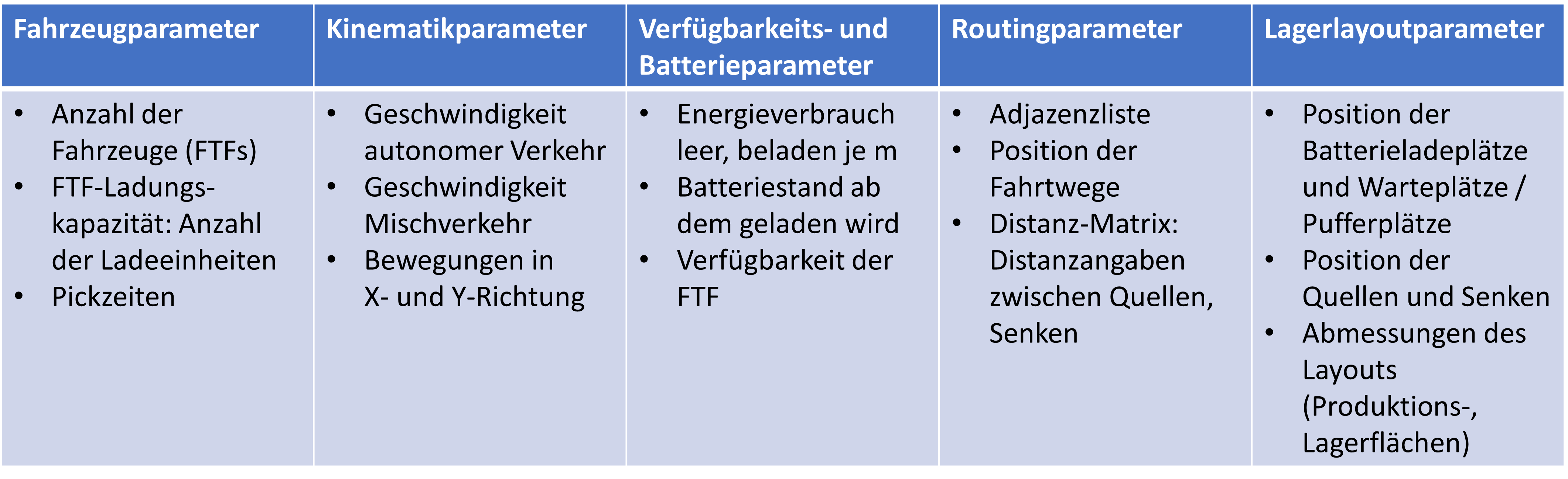
- Parameter-Modul: verwaltet alle Parameter und ermöglicht damit eine einfache Durchführung von Simulationsexperimenten und FTS-Vergleichen.
Die Simulation verdeutlicht, dass keine lineare Skalierbarkeit von FTS durch den Einsatz zusätzlicher FTFs gewährleistet ist. Denn ein höheres FTF-Aufgebot führt nicht zwangsläufig zu einem höheren Transportdurchsatz, dies gilt insbesondere in der Nähe des sogenannten Grenzdurchsatzes von FTS. Darüber hinaus können mit Hilfe der Simulation potenzielle Engpässe zwischen den Be- und Entladestationen sowie den vor- oder nachgeschalteten Produktions- oder Logistikprozessen ermittelt werden. Oftmals ist es sinnvoller die Be-, Entladebereich durch Pufferplätze zu ergänzen, als zusätzliche FTFs zu integrieren.
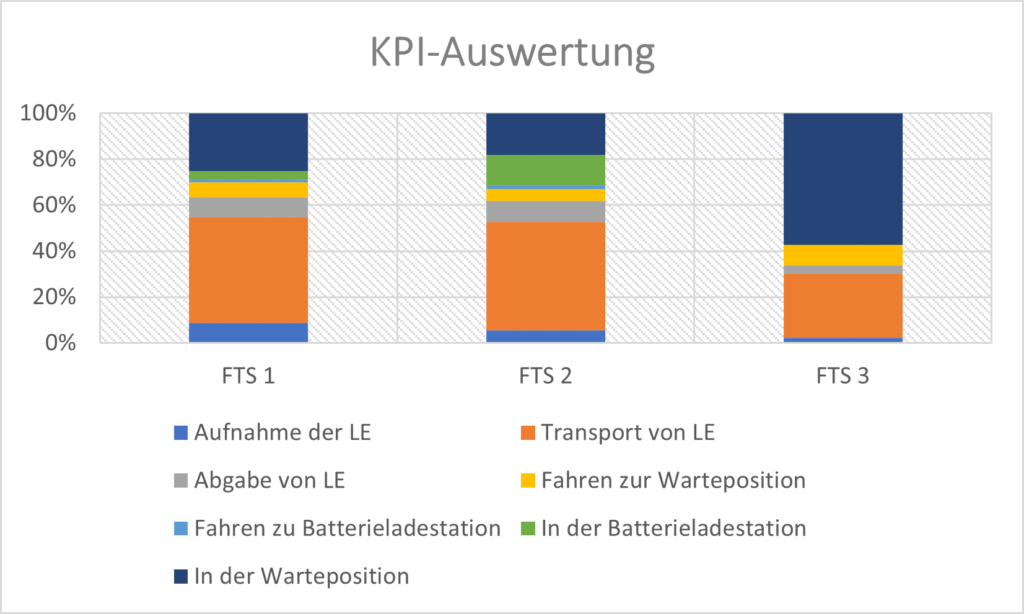
Um den Anwender bei der Planung seines FTS-Systems zu unterstützen werden unterschiedliche Daten, während dem Simulationslauf gespeichert, wie z.B.: die Dauer, die ein FTF in Wartepositionen, an Batterieladeplätzen, bei der Materialaufnahme oder -abgabe verbracht hat. Durch die Verwendung dieser FTS-spezifischen Key Performance Indicators (KPIs) ist es möglich, die wirtschaftlich sinnvolle Anzahl von FTFs zu bestimmen, eine Optimierung der Puffergröße an den Übergabeplätzen vorzunehmen als auch den jeweiligen Grenzdurchsatz über die Zeit zu bestimmen.
Das flexibel einsetzbare AGV-SimKit wurde so erstellt, dass in der Regel keine Programmierung zur Durchführung der Simulationsexperimente erforderlich ist. Es stellt somit ein leistungsstarkes Werkzeug dar, um FTS-Systeme zu simulieren und zu optimieren.
Erste praktische Anwendungen des AGV-SimKit im Bereich fahrerloser Transportsysteme (FTS) haben die Vorteile und die damit verbundene Reduzierung des Aufwands bestätigt. Dies gilt insbesondere für typische Szenarien in der FTS-Planung, die aus mehreren Fahrerlosen Transportfahrzeugen und deren materialflusstechnischer Integration bestehen.
Sollten Sie Interesse an einer Web-Vorführung haben, so kontaktieren Sie uns gerne.
Quellen
| [1] | Industrie 4.0 bringt Losgröße 1 | Fachwissen für Intralogistik.[Online]. Verfügbar unter: https://www.bito.com/de-de/fachwissen/artikel/individuelle-fertigung-bis-losgroesse-1-gehoert-die-zukunft/ (Zugriff am: 11. Januar 2023). |
| [2] | Lienert, T. (2021) Methodik zur simulationsbasierten Durchsatzanalyse FTF-basierter Kommissioniersysteme, Dissertation, München, Technische Universität. |
| [3] | Vogel Business Media GmbH & Co. KG, „Fahrerlose Transportsysteme: Was sind fahrerlose Transportsysteme? Definition & Vorteile“, 2017. |